人形机器人“居家化”倒计时
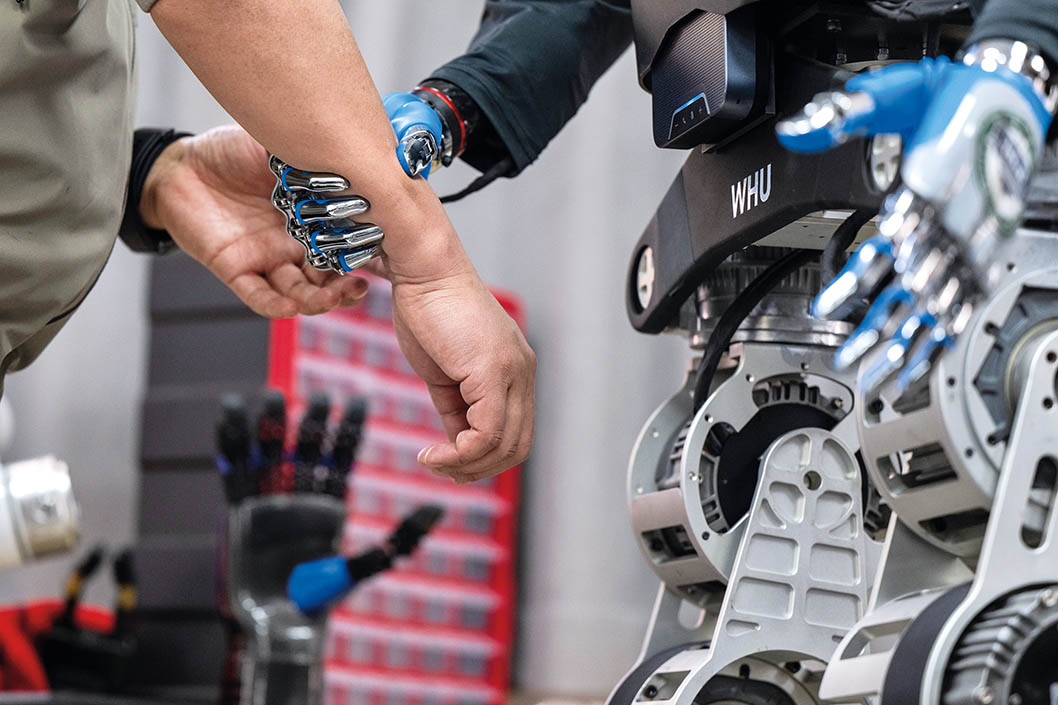
3月19日,在武汉大学机器人学习算法与软操作实验室内,研发团队在对“天问”人形机器人进行研发调试
文/徐一平 窦淼磊
编辑/胡艳芬
从工业场景到商业场景再到家庭场景,被认为是机器人落地应用的三部曲。因为家庭场景所特有的非标准化、任务多样化,且与环境和人的交互要求最复杂,可以说,机器人从工业走进家庭,本质上是实现从“确定性”向“不确定性”的跨越。
特斯拉创始人兼首席执行官埃隆·马斯克曾表示,未来地球上每个人都可能拥有至少一个机器人,暗示全球机器人数量可能达到100亿个甚至更多。如果真能如此,机器人将进入每个家庭,成为儿童、老人的陪伴者、照料者,以及家务助手。
高盛一项最新研究预测,到2035年,人形机器人市场规模将达到380亿美元;花旗银行则估计,到2050年全球将有6.48亿台人形机器人。这预示着,未来10到20年间,人形机器人将明显应用于家居场景中。
智能和仿生
在大模型出现前,给机器人下达的任务指令,是通过编程写在机器人的大脑里的。比如你不需要对扫地机器人说“现在开始扫地”,也不需要向它解释什么是扫地,它就会根据预设程序开始工作,并在结束工作后找到自己的充电站。
如今,具身智能大模型正逐步从单一模态迈向以图像-语言-动作(VLA)为代表的多模态大模型时代。今年2月,美国Figure AI公司发布的Helix VLA模型,通过对人类脑科学的研究构建起慢思考和快思考两个系统,让机器人既能理解模糊的人类语言,又能实现毫米级操作精度。
从语言大模型(LLM)、视觉大模型(VLM)到VLA大模型的转变,不仅意味着机器人将拥有更强大的信息处理能力,还预示着它们将能打破语言与视觉的局限,实现更为复杂、灵活的交互方式。
在Figure AI公司的演示中,当机器人Figure 02接收到“整理房间的东西”这句指令后,会对身边的杂物、蔬果等进行辨别、分类,再将它们分别放进抽屉或冰箱。两台机器人甚至还可以进行协作,比如机器人A将物品递给机器人B,由机器人B负责收纳。

3月22日,在位于江苏无锡的天奇股份人形机器人数据采集实训基地,工程师在调试人形机器人
多模态与仿生技术,正在打开机器人的“感官屏障”。波兰Clone公司的仿生机器人Protoclone V1展示了仿生技术在机器人领域的巨大潜力,它代表着机器人正从传统的电机驱动向仿生驱动转变。它高度模拟人体的心脏(电动泵)、血液(液压油)、肌肉(人造肌肉技术)等构造,行走时步态流畅。据介绍,其将主要用于家庭场景,具有对话、握手、倒饮料、做三明治等功能。
挪威1X公司的家用机器人NEO Gamma展示了另一种解决方案:视觉系统采用事件相机(Event Camera)技术,在低光照下仍能以微秒级延迟捕捉物体的动态;拥有20个自由度(即有20个可独立控制的关节弯折点,人类一只手大约有27个自由度)的灵巧手、尼龙皮肤和内置100个压力传感器的触觉手套,可识别玻璃表面污渍的摩擦力差异,实现“擦窗不留痕”。
腾讯自研的TRX-Hand灵巧手,采用仿生设计并具有20个自由度,能搬运超过20公斤的重物,与一个成年人的能力相当。
在居家场景中,这类技术突破意味着机器人既能稳妥搬运重物,也可轻柔协助老人起身,甚至完成穿针引线这类精细操作。尼龙仿生皮肤的应用更将触觉反馈误差控制在更小范围内,大幅提升服务安全性。
必须是“人形”吗
人形设计可通过面部表情、手势、眼神、情绪、语音等拟人化交互方式,增强用户接受度。例如,上一代人形机器人代表Pepper就可以通过拟人化动作提升儿童和老人的交流兴趣;Engineered Arts开发的仿真机器人Ameca接入了GPT-4语言模型,能实时分析人类的面部表情、语音、情感和体态动作,从而做出相匹配的情感回应。
这类功能搭配人形外观带来更强的亲和力,是其他形态的机器人难以替代的。2024年,腾讯研究院曾做过一项线上调查,结果显示75%的受访者希望拥有实体陪伴机器人,其中36%更偏好能模拟真实情感互动的人形机器人。
比如,腾讯发布的人居环境机器人“5号”具有环境适应性和人机安全交互能力,它采用四腿轮足复合设计,能在跨越障碍的同时保持运行效率,具备上下楼梯和平稳搬运物品的能力。这是单纯的轮式机器人无法完成的。
然而,双足、双手的人形结构,也会带来运动稳定性与能耗方面的问题,最终因高成本影响商业化进度。例如高自由度的关节设计导致能耗剧增;类人形态依赖精密零部件(如谐波减速器、丝杠),制造工艺复杂、成本高昂;人形机器人需整合感知、决策、控制等多模块算法,但不同任务缺乏统一底层模型,导致开发周期长、兼容性差。
2024年末,在回应机器人发展中的“人形路线”之争这一问题时,腾讯首席科学家、腾讯Robotics X实验室主任张正友表示,机器人设计不一定需要人形,应回归初心,考虑如何能更好地服务人类。
我们应该转变认识,将机器人的分类从按形态分转向按人的需求来分,建立一套“人居环境机器人”体系。人居机器人的形态可以更多维——OpenAI支持的人形机器人1X成为世界上第一种可以和人类同居的机器人,而1X就是一个以轮子为腿的仿人形机器人;斯坦福大学开发的Mobile ALOHA机器人在移动底座上集成了两个机械臂,能完成诸如烹饪、清洗碗具、铺床等多项灵活操作。将抓取、移动、简单搬运等任务进行稳定和泛化。
适应“银发社会”需求
2025年的政府工作报告首次提出培育具身智能等未来产业,大力发展机器人新终端。今年初,《中共中央 国务院关于深化养老服务改革发展的意见》发布,提出要“研究设立养老服务相关国家科技重大项目,重点推动人形机器人、脑机接口、人工智能等技术产品研发应用”。
中国预计在2035年进入重度老龄化社会,65岁以上人口占比将超过21%,专业护工缺口高达1300万人,独居者、双职工家庭对家务助手的渴望也在攀升。
自2020年以来,联合国、世界卫生组织及中国智慧养老主管部门强调,可将机器人作为应对老龄化的创新解决方案,拓展其在康复训练、行为辅助及安全监护领域的应用,以及研发家居场景的智能服务机器人。
尽管诸如环境控制、体位调整、体征监测甚至心理陪伴等都是极为典型的照护场景,却极容易因处理不当等因素,带来老人和照护者的双重压力。因此,养老机器人需要以安全交互为底线,并提供梯次化服务。腾讯“5号”机器人在手臂上部署了自研的具有180个检测点的大曲面覆盖触觉皮肤,这不仅提升了机器人的感官灵敏度,也增强了其对老年人跌倒等情况的监测与保护功能。
中国已有部分城市对机器人餐厅等创新场景颁发“经营许可证”,预示着未来在社区养老领域,机器人也有望释放更多潜能。
机器人家居化的社会配套
机器人是具有实体形态的人工智能(AI),是服务人类活动的物理实体,人形机器人进入家庭,是精密的机械系统嵌入非结构化物理空间的过程,所以环境的适配不可忽视。2023年腾讯研究院发布了《人机友好空间探索》报告,指出人形机器人进入人居环境,除技术、市场、政策外,在基础设施、社会层面的探讨也同样迫切。

3月6日,在国家会展中心(天津),宇树科技带来的一款人形机器人现场表演
在家里,有不停跑动的孩童、不知躲在哪里的猫、容易受惊吓的狗、掉落的透明塑料袋、随时被宠物或孩子弄湿的地板……这是相比于其他场景更为复杂多变的环境——酒店的送餐机器人可通过1.2~1.8米/秒的低速行驶和视觉定位与地图构建技术(VSLAM)降低风险,但居家人形机器人需要更高的自主决策能力,甚至要在毫秒内作出反应。特斯拉Optimus机器人的灵巧手已能抓取小型物品,但力控精度仍需提升,毕竟人类无法容忍一台捏疼老人手腕的“智能护工”。
此外,传统的基础设施,比如家庭空间摆设、建筑物、道路是否能够适配机器人?是否有广泛的物联传感系统、通信网络、能源供给来支撑家用人形机器人的运行?如果不能,我们需要对生活空间进行怎样的改造,才能实现从软件到硬件的双向人机友好?
技术方面的准备不可或缺。一方面大语言模型、端到端训练、五指灵巧手,甚至直驱电机等技术和工程正加速迭代,机器人岗前培训进度条正按月刷新;另一方面,大模型“数据饥渴症”,对高度泛化场景的识别,以及人形机器人商业化、多样化应用等难题仍在求解中。多重因素作用下,机器人厂商仍在叠buff、均成本和赢利润的不可能三角中找平衡。
数字技术为具身智能训练带来了降本的前景。例如英伟达Isaac平台、腾讯Robotics X实验室等正探索构建“仿真训练平台”“数据工程平台”等,改写机器人创造模式。例如通过开源计算机模拟系统Genesis创建的4D动态环境,机器人可在虚拟空间完成百万次“跌倒-站起”训练。
我们还需要制定法规与伦理标准来守住安全底线。就像汽车上要装载各种雷达、摄像头等传感器,机器人也要依靠许多信号采集装置来提高感知系统的灵敏度。人形机器人在家庭中工作,必然会收集大量用户数据,如何确保这些数据的安全性和保护隐私,是立法者和技术开发者需要共同面对的挑战。
机器人与人类的交互伦理问题也不容忽视。例如,当机器人照护老人或孩子时,如何确保其行为符合伦理规范,避免对用户造成心理或情感上的伤害,是需要深入探讨的问题。
人形机器人进入居家场景,不仅是技术与产业链的创新和整合,也是社会系统的适应性改造。技术乐观主义者预言,2035年将是居家机器人普及元年;谨慎派则提醒,实验室性能与真实场景存在“代差”。无论如何,一场重构生活方式的变革,正在身边发生,我们都有机会拥有一个全能的家庭助手。
(作者均系腾讯研究院高级研究员)

 手机版
手机版